El gobierno de Tailandia ha destinado dos mil millones de bahts (aproximadamente 63.3 millones de dólares) para el próximo año, a la compra de computadoras tablet que serán entregadas a alumnos de séptimo grado.
Recientemente ya se ha llevado a cabo una ceremonia presidida por el Ministro de Educación Suchart Thada-Thamrongvech, y el Ministro de Tecnologías de la Información y Comunicaciones, Anudith Nakornthap, en la cual se enviaron 55,000 de estos dispositivos a los estudiantes de primer grado (Prathom 1).
Las tablets serán distribuidas en oficinas del área de servicios educativos en las provincias de Krabi, Bangkok, Kanchanaburi, Kalasin, Khamphaeng Phet, Khon Kaen, Chanthaburi y Chachoengsao.
El Ministro Suchart explicó que “Los estudiantes que recibirán las tablets podrán llevarlas a casa, si los padres y los profesores se los permiten. Los niños tendrán la propiedad de las tabletas después de tres años”. Agregó que durante este año se seguirán entregando a estudiantes de Prathom 1 todos los 800,000 dispositivos que se tenían previstos.
El ministerio está desarrollando contenido de aprendizaje en formato digital para estudiantes de segundo a cuarto grado, que estará disponible en línea para ser descargado también por maestros, y con los 2 mil millones asignados a este proyecto para el próximo año, se planea adquirir otras 700,000 tablets. Los pocos dispositivos que resultaron defectuosos se regresarán y serán reemplazados.
El dinero es parte del presupuesto para el año 2013 que está en espera de ser aprobado por el parlamento.
Veritas Scientific, una nueva compañía de productos y servicios neurocientíficos con un sitio web inferior, está creando un casco para leer la mente que amenaza con invadir la privacidad de nuestros pensamientos.
Si bien el producto por sí mismo pudiera no ser alarmante, lo que Eric Elbot, director ejecutivo de la compañía, dijo a la revista IEEE Spectrum sí lo es: “El último reino de la vida privada es tu mente. Esto lo invadirá”.
El casco será similar a los de motocicleta, y tendrá sensores que leerán la actividad del cerebro conforme éste responde a imágenes que parpadean a través del visor. Ya que el reconocer indica memoria y la memoria indica conocimiento, Veritas tiene como objetivo el desarrollo de un casco electroencefalograma que registre picos en la actividad del cerebro provocados por imágenes que le resulten familiares al individuo.
Una vez terminado el producto, parece que se tiene en mente ofrecerlo a los militares de Estados Unidos. Elbot imagina posibles escenarios como, por ejemplo, que tropas estadounidenses reunan a todos los hombres de alguna remota villa de Afganistán y les pongan los cascos, y enseguida observar los picos en la actividad cerebral que se produzcan al mostrarles imágenes de bombas o combatientes talibanes, y de esta manera descubrir quienes son simpatizantes o enemigos.
Además, Elbot comenta que esta tecnología será útil para agencias policiales, procesos penales y adquisiciones corporativas, y eventualmente estaría disponible como aplicaciones de smartphone para civiles.
Sin embargo, uno puede tomarse la libertad se ser un tanto paranóico al respecto, ya que el mismo Eric Elbot reconoce que “Ciertamente es una herramienta potencial para el mal. Si sólo el gobierno tiene este dispositivo, sería extremadamente peligroso”.
Un sistema de imágenes de telescopio avanzado que comenzó a tomar datos en Junio de 2012 es el primero de este tipo capaz de detectar planetas que orbitan soles fuera de nuestro sistema solar. El conjunto colaborativo de instrumentos y software de alta tecnología, llamado Proyecto 1640, ahora está operando en el telescopio Hale del Observotorio Palomar cerca de San Diego, después de más de 6 años de desarrollo.
Los investigadores e ingenieros detrás del proyecto vienen del Museo Americano de Historia Natural en Nueva York, N.Y., el Instituto Tecnológico de California en Pasadena, y el Laboratorio de Propulsión a Chorro (JPL) de la NASA, también en Pasadena.
Las primeras imágenes del proyecto demuestran una nueva técnica que crea “agujeros negros” extremadamente precisos alrededor de las estrellas de interés. Estos agujeros negros permiten a los investigadores detectar planetas.
“Cuanto más aprendemos acerca de ellos, más nos damos cuenta de cuán diferentes los sistemas planetarios pueden ser del nuestro”, dijo Gautam Vasisht del JPL. “Todos los indicios apuntan a una diversidad tremenda de sistemas planetarios, mucho más allá de lo imaginado hace apenas 10 años. Estamos al borde de un nuevo campo increíblemente rico”.
La financiación para el Proyecto 1640 es de la NASA, la National Science Foundation , JPL y los fondos de desarrollo interno de Caltech Optical Observatories, el Programa de Instrumentación para Investigacion de la Universidad de la Defensa (DURIP), la Plymouth Foundation, Ron y Glo Helin, y Hilary y Ethel Lipsitz.
Estas dos imágenes muestran HD 157728, una estrella cercana 1.5 veces más grande que el Sol. La estrella está centrada en las dos imágenes, y su luz ha sido removida por un sistema de óptica adaptativa y un cronógrafo que pertenece a Proyecto 1640, que utiliza la nueva tecnología en el telescopio Hale de 200 pulgadas del Observatorio Palomar cerca de San Diego, California, para detectar planetas. Imagen: Proyecto 1640 / NASA.
Sistema semi-autónomo toma el volante para mantener al conductor seguro.
Jennifer Chu, MIT News Office. Original (en inglés).
Barriles y conos puntean un campo abierto en Saline, Michigan, formando una pista de obstáculos para un vehículo modificado. Un conductor dirige remotamente el vehículo a través de la pista desde una ubicación cercana mientras un investigador observa. Ocasionalmente, el investigador indica al conductor que mantenga el volante recto — una trayectoria que parece poner al vehículo en un curso de colisión con un barril. A pesar de las acciones del conductor, el vehículo se dirige a sí mismo rodeando el obstáculo, devolviéndole el control al conductor una vez que el peligro ha pasado.
La clave de la maniobra es un nuevo sistema de seguridad semiautónomo desarrollado por Sterling Anderson, un estudiante de doctorado en el Departamento de Ingeniería Mecánica del MIT (Massachusetts Institute of Technology – Instituto Tecnológico de Massachusetts), y Karl Iagnemma, un científico investigador principal en el Grupo de Movilidad de Robótica del MIT.
El sistema utiliza una cámara a bordo y un telémetro láser para identificar los peligros en el entorno de un vehículo. El equipo ideó un algoritmo para analizar los datos e identificar las zonas de seguridad — evitando, por ejemplo, barriles en un campo, o otros autos en una carretera. El sistema permite a un conductor controlar el vehículo, sólo tomando el volante cuando el conductor está a punto de salir de una zona de seguridad.
Anderson, quien ha estado probando el sistema en Michigan desde el pasado mes de septiembre, lo describe como un ‘co-piloto inteligente’, que monitoriza el desempeño de un conductor y hace ajustes “detrás de escenas” para salvaguardar al vehículo del choque con obstáculos, o mantenerlo dentro de una región segura del entorno, tales como un carril o un área abierta.
“La verdadera innovación es permitir al coche para compartir [el control] contigo”, dice Anderson. “Si usted desea conducir, sólo va a… asegurarse de usted no golpee nada.”
El grupo presentó los detalles del sistema de seguridad recientemente en el Simposio de Vehículos Inteligentes en España.
Fuera del camino transitado
La investigación robótica se ha centrado en los últimos años en el desarrollo de sistemas — desde automóviles hasta equipos médicos y maquinaria industrial — que pueden ser controlados por robots o humanos. En su mayor parte, tales sistemas operan a lo largo de caminos preprogramados.
Como ejemplo, Anderson señala la tecnología detrás de los coches que se estacionan por sí mismos. Para estacionar en paralelo, un conductor involucra la tecnología accionando un switch y alejando sus manos del volante. El coche, entonces se estaciona a sí mismo, siguiendo una ruta previamente planeada en base a la distancia entre los coches vecinos.
Mientras que una ruta planeada puede funcionar bien en una situación de estacionamiento, Anderson dice que a la hora de conducir, una o incluso varias rutas es demasiado limitante.
“El problema es que los seres humanos no piensan de esa manera”, dice Anderson. “Cuando tú y yo manejamos, [no] escogemos un solo camino y lo seguimos obsesivamente. Normalmente, tu y yo vemos un carril o un estacionamiento, y decimos ‘Aquí está el campo de un viaje seguro, aquí está toda la región de la carretera que puedo usar, y no me voy a preocupar de permanecer en una línea específica , siempre y cuando esté a salvo en la carretera y evite colisiones'”.
Anderson e Iagnemma integraron este punto de vista humano en su sistema robótico. El equipo vino con un enfoque para identificar zonas seguras, u “homotopías,” en lugar de rutas específicas de viajes. En lugar de trazar las trayectorias individuales a lo largo de una carretera, los investigadores dividieron el entorno del vehículo en forma de triángulos, con ciertos bordes del triángulo representando un obstáculo o el límite de un carril.
Los investigadores idearon un algoritmo que “restringe” los bordes de obstáculos contiguos, lo que permite al conductor navegar a través de cualquiera de los bordes del triángulo excepto aquellos que están restringidos. Si un conductor está en peligro de cruzar borde restringido — por ejemplo, si se ha dormido al volante y está a punto de chocar hacia una barrera o un obstáculo — el sistema se hace cargo, dirigiendo al carro de vuelta dentro de la zona de seguridad.
Generando confianza
Hasta el momento, el equipo se ha hecho más de 1.200 pruebas del sistema, con pocas colisiones; la mayoría de ellas ocurrieron cuando problemas técnicos en la cámara del vehículo fallaron al identificar un obstáculo. En su mayor parte, el sistema ha ayudado con éxito a los conductores a evitar colisiones.
Benjamin Saltsman, gerente de tecnología e innovación inteligente del vehículo camión en Eaton Corp., dice que el sistema tiene varias ventajas sobre las variantes totalmente autónomas tales como los vehículos auto-conducidos desarrollados por Google y Ford. Estos sistemas, dice, están cargados de sensores costosos, y requieren grandes cantidades de computación para planificar rutas seguras.
“Las implicaciones del sistema de [Anderson] es que lo hace más ligero en cuanto a sensores y requisitos computacionales que lo que un vehículo totalmente autónomo requeriría”, dijo Saltsman, quien no estuvo involucrado en la investigación. “Esta simplificación lo hace mucho menos costoso, y más cercano en términos de implementacion potencial.”
En los experimentos, Anderson también ha observado una respuesta humana interesante: Los que confían en el sistema tienden a desempeñarse mejor que los que no lo hacen. Por ejemplo, cuando se pide que mantengan el volante recto, incluso frente a una posible colisión, los conductores que confiaron en el sistema condujeron a través del trayecto más rápidamente y con mayor confianza que los que desconfiaban del sistema.
¿Y cómo se sentiría el sistema para alguien que no es consciente de que está activado? “Lo más probable es que solamente pienses que eres un piloto con talento”, dice Anderson. “Dirías, ‘Hey, logrado esto’, y no sabrías que el coche está cambiando las cosas detrás de escenas para asegurarse de que el vehículo permanezca seguro, incluso si tus aportes no lo son. ”
Él reconoce que esto no es necesariamente una cosa buena, especialmente para las personas que están aprendiendo a conducir; los principiantes pueden llegar a pensar que son mejores conductores de lo que realmente son. Sin la retroalimentación negativa, con el tiempo estos conductores pueden llegar a ser menos hábiles y más dependientes de la ayuda. Por otro lado, Anderson dice que los conductores expertos pueden sentirse acorralados por el sistema de seguridad. Él e Iagnemma ahora están explorando formas de adaptar el sistema a distintos niveles de experiencia de conducción.
El equipo también espera recortar el sistema para identificar obstáculos utilizando sólo un teléfono móvil. “Se puede meter el móvil en el salpicadero, y usaría la cámara, acelerómetro y giroscopio para proporcionar la retroalimentación necesitada por el sistema”, dice Anderson. “Creo que vamos a encontrar mejores formas de hacerlo que serán más sencillas, económicas y permitan que más usuarios tengan acceso a la tecnología”.
Esta investigación fue apoyada por la Oficina de Investigación del Ejército de los Estados Unidos y la Agencia de Proyectos de Investigación Avanzada de Defensa. La plataforma experimental fue desarrollada en colaboración con Quantum Signal LLC con la ayuda de James Walker, Steven Peters y Sisir Karumanchi.
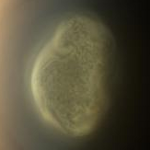
Imágenes de la nave espacial Cassini de la NASA muestra una concentración de neblina de gran altitud y un vórtice materializándose en el polo sur de la luna Titán de Saturno, señala que las estaciones están cambiando en la luna mayor de Saturno. “La estructura dentro del vórtice es una reminiscencia de la convección celular abierta que se ve a menudo sobre los Océanos de la Tierra”, dijo Tony Del Genio, un miembro del equipo Cassini del Instituto Goddard para Estudios Espaciales, en Nueva York. “Pero a diferencia de la Tierra, donde dichas capas están justo encima de la superficie, este está a una gran altura, tal vez una respuesta de la estratósfera de Titán al enfriamiento estacional según se acerca el invierno del sur. Pero tan pronto en el juego, no estamos seguros”.
Cassini vio por primera vez una “capucha” de bruma a gran altura y un vórtice, que es una masa de gas que se arremolina alrededor del polo de la atmósfera de la luna, en el polo norte de Titán cuando la nave llegó por primera vez al Sistema de Saturno en 2004. En ese momento, era invierno en el norte. Múltiples instrumentos han estado manteniendo un ojo en la atmósfera de Titán por encima del polo sur en busca de señales de la llegada del invierno del sur.
Mientras que la cubierta norte se ha mantenido, la circulación en la atmósfera superior se ha estado moviendo desde el iluminado polo norte al polo sur en enfriamento. Este movimiento parece estar causando hundimientos en el polo sur y la formación de bruma de gran altitud y un vórtice.
Las cámaras de luz visibles de Cassini muestran los primeros signos de brumas comenzando a concentrarse encima del polo sur de Titán en Marzo, y el espectómetro de mapeo visual e infrarrojo de la nave espacial (VIMS – Visual and Infrared Mapping Spectrometer) obtuvo imágenes de falso color el 22 de mayo y 7 de Junio.
“VIMS ha visto una concentración de aerosoles formándose cerca de 300 kilómetros (200 millas) por encima de la superficie del polo sur de Titán”, dijo Christophe Sotin, un miembro del equipo del VIMS en el Laboratorio de Propulsión a Chorro (JPL) de la NASA, en Pasadena, California. “Nunca hemos visto aerosoles aquí en este nivel antes, así que sabemos que esto es algo nuevo”.
Durante un sobrevuelo distante el 27 de Junio, las cámaras de imagen de Cassini capturaron una vista de ojo de cuervo del vórtice del polo sur en luz visible. Estas nuevas imágenes muestran esta independiente capa de bruma de gran altitud con detalle nuevo y sorprendente.
“Las futuras observaciones de estas características proporcionarán buenas pruebas de modelos dinámicos de la circulación, química, nubes y procesos de aerosol de Titán en la atmósfera superior”, dijo Bob West, subdirector líder del equipo de imágenes en el JPL. La misión Cassini-Huygens es un proyecto cooperativo de la NASA, la Agencia Espacial Europea y la Agencia Espacial Italiana. El Laboratorio de Propulsión a Chorro, una división del Instituto Tecnológico de California en Pasadena, administra la misión Cassini-Huygens para la Dirección de Misiones Científicas de la NASA, en Washington. El orbitador Cassini y sus dos cámaras a bordo fueron diseñadas, desarrolladas y ensambladas en el JPL. El equipo de imágen está basado en el Instituto de Ciencia Espacial en Boulder, Colorado.
Imagen: NASA/JPL-Caltech/University of Arizona/LPGNantes
Si bien los 500 millones de usuarios de Internet en China están desde hace tiempo conscientes de la presencia de censores que constantemente estan vigilando sus actividades en línea y borrando sus mensajes más provocadores, ahora el ‘Gran hermano’ podría tener que acostumbrarse también a que alguien mire sobre sus hombros.
Esto es gracias a un nuevo software que permite ver más de cerca qué contenido en los sitios de medios sociales Chinos está siendo objeto de censura.
Gary King, un profesor en el departamento de gobierno de la Universidad de Harvard, junto con su equipo, estuvieron usando un programa de la compañía Crimson Hexagon Inc, para observar la actividad en torno a 85 temas delicados. Se pudo determinar en qué momento los mensajes que tocaban esos temas aparecían y desaparecían, y además, cuanto tiempo tardaba cada mensaje en ser censurado.
“El gobierno chino tomó la decisión de permitir a su gente tener medios de comunicación social, pero también construyó una gran máquina para controlar lo que se dice”, dijo King, y en su informe se habla de que el 13% de todos los mensajes de los medios sociales en China fueron censurados.
Lo curioso es que los objetos de censura no fueron rigurosamente las publicaciones de crítica al gobierno, sino aquellos mensajes cuyo propósito era conseguir gente para reunirse, potencialmente en protesta, y este tipo de publicaciones eran desaparecidas en cuestión de horas.
A diferencia del equipo de la Universidad de Harvard, los investigadores de la Universidad de Hong Kong desarrollaron un programa que se enfoca exclusivamente en el sitio de microblogging más popular de China, Sina Weibo. El software, llamado WeiboScope, supervisa las cuentas de 300,000 usuarios que tienen cada uno más de 1,000 seguidores, y permitio observar el trabajo de los censores casi en tiempo real.
Después, los investigadores analizaron los mensajes removidos para tratar de adivinar lo que los había hecho inaceptables para los censores.
“Lo que estamos encontrando es una lista de palabras clave en constante transformación, un concurso del gato y el ratón entre las personas y los censores”, dijo King-wa Fu, profesor asistente y uno de los desarrolladores de WeiboScope.
La idea de estos programas es lograr crear una imágen más transparente de la censura en China, y probablemente, también anticipar cuando algo importante está a punto de suceder, ya que al examinar los datos relacionados con escándalos, se observó un aumento significativo en la cantidad de censura que hubo en relacion a esos temas, desde días antes en que las noticias se hicieran públicas.
Hasta el momento estos equipos de investigadores se habían enfocado en acontecimientos pasados, pero ahora que han llegado a las conclusiones iniciales, se muestran dispuestos a vigilar lo que venga en camino.
El teclado QWERTY se ha utilizado desde 1878, primeramente en las antiguas máquinas de escribir. Se introdujo con el propósito de poder usar ambas manos y de distanciar las teclas más usadas para evitar que se trabaran los pequeños martillos que imprimían las letras. Hasta la fecha lo seguimos encontrando en muchos dispositivos, incluso en los smartphones, pero es tiempo de dar fin a ese teclado, que según el empresario John Lambie, se ha vuelto “disfuncional” en la actualidad.
Otro teclado existente aún en muchos teléfonos móviles es el alfanumérico, que desde una perspectiva de eficiencia es terrible, ya que se tienen que presionar las teclas varias veces hasta escoger la letra que se desea utilizar, y fue difícil para muchas personas hasta que obtenían la práctica para escribir mensajes con rapidez.
Lambie estuvo buscando alternativas en torno a QWERTY, y actualmente se encuentra en los Estados Unidos comparando ‘Dextr’, un teclado que diseñó para un uso óptimo con un solo dedo, o que también puede separarse en dos para facilitar la escritura con los dos pulgares. En caso de adoptarse, QWERTY dejaría de estar en los teclados de los smartphones.
Lo que inspiró a Lambie a crear este teclado fue un profesor en una universidad que tenía parálisis cerebral severa y debido a eso, un uso muy limitado de sus dedos y manos, y que en cada discurso encontraba un momento para comentar algo despectivo sobre QWERTY.
“Se ha vuelto tan arraigado, desafortunadamente, que la raza humana está casi condenada a usarlo”
En cambio, el teclado Dextr está en orden alfabético con las letras divididas en cinco filas en vez de tres y puede ser volteado para facilitar su uso por personas zurdas. La gente en países desarrollados que han hecho el cambio de teclado, ya han proclamado y comprobado que es fácil de usar.
Lambie está desarrollando un teclado para los teléfonos Android (Apple y Microsoft no van a permitir a los desarrolladores cambiar el teclado de sus smartphones), que debería estar listo entre agosto y septiembre para ser descargado como una aplicación.
Cabe agregar que ya hay disposiciones de teclado mejores que QWERTY, como Dvorak, patentado en 1936 por August Dvorak y William Dealeyque, que por experiencia propia, puedo decir que la distribución de sus letras es mucho más eficaz para escribir con mayor rapidez, ya que las letras de uso frecuente están cercanas y no es necesario verlas en lo absoluto, y aún con esto, la probabilidad de cometer errores se reduce significativamente.
El problema, comenta Lambie, es que a pesar de los beneficios obtenidos al cambiar de teclado, la mayoría de las personas se frustran antes de lograr su objetivo, pierden la motivación para adaptarse a un mejor diseño.
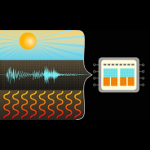
Un sistema desarrollado en el MIT (Massachusetts Institute of Technology – Instituto Tecnológico de Massachusetts) podría combinar energía recolectada de la luz, calor y vibraciones, para ejecutar sistemas de vigilancia.
David L. Chandler, MIT News Office. Original (en inglés).
Los investigadores del MIT han dado un paso significativo hacia los sistemas de vigilancia sin baterías — que podría finalmente ser utilizado en dispositivos biomédicos, sensores del medio ambiente en lugares remotos y medidores en puntos de difícil acceso, entre otras aplicaciones.
El trabajo previo del laboratorio de profesor Anantha Chandrakasan del MIT, se ha enfocado en el desarrollo de chips de computadora y comunicación inalámbrica, que pueden operar a niveles de energía extremadamente bajos, y en una variedad de dispositivos que pueden aprovechar el poder de la luz natural, el calor y vibraciones en el medio ambiente. El desarrollo más reciente, llevado a cabo con el estudiante de doctorado Saurav Bandyopadhyay, es un chip que podría aprovechar las tres de estas fuentes de energía ambiental a la vez, optimizando el suministro de energía.
El circuito de combinación de energía se describe en un artículo que se publicará este verano en el Diario de Circuitos de Estado Sólido del IEEE.
“La recolección de energía se está convirtiendo en una realidad”, dice Chandrakasan, el profesor de Ingeniería Eléctrica de Keithley y director del Departamento de Ingeniería Eléctrica y Ciencias Computacionales del MIT. Los chips de bajo consumo de energía que pueden recopilar datos y transmitirlos a una estación central están en desarrollo, así como los sistemas para aprovechar la energía de fuentes ambientales. Pero el nuevo diseño logra un uso eficiente de múltiples fuentes de energía en un solo dispositivo, una gran ventaja ya que muchas de estas fuentes son intermitentes e impredecibles.
“La clave aquí es el circuito que combina eficientemente muchas fuentes de energía en una sola”, dice Chandrakasan. Los dispositivos individuales necesarios para aprovechar estas pequeñas fuentes de energía — como la diferencia entre la temperatura del cuerpo y el aire exterior, o los movimientos y vibraciones de cualquier cosa de una persona que camina a un puente en vibración porque el tráfico pasa sobre él – ya se han desarrollado, muchos de ellos en el laboratorio de Chandrakasan.
Combinando el poder de estas fuentes variables requiere un sofisticado sistema de control, Bandyopadhyay explica: Por lo general cada fuente de energía requiere su propio circuito de control para cumplir con sus requisitos específicos. Por ejemplo, circuitos para aprovechar diferencias térmicas producen típicamente sólo de 0,02 a 0,15 voltios, mientras que las células fotovoltaicas de baja potencia pueden generar de 0,2 a 0,7 voltios y los sistemas de recolección de vibraciones pueden producir hasta 5 voltios. La coordinación de estas diferentes fuentes de energía en tiempo real para producir una salida constante es un proceso difícil.
Hasta ahora, la mayoría de los esfuerzos para aprovechar múltiples fuentes de energía simplemente han conmutado entre ellos, aprovechándose del que esté generando la mayor cantidad de energía en un momento dado, dice Bandyopadhyay, pero que puede desperdiciar la energía que está siendo entregada por las otras fuentes. “En lugar de eso, se extrae la energía de todas las fuentes”, dice. El enfoque combina la energía de múltiples fuentes al cambiar rápidamente entre ellas.
Otro desafío para los investigadores fue reducir al mínimo la energía consumida por el circuito de control en sí, para dejar lo más posible a los dispositivos que en realidad está alimentando — tales como sensores para medir la frecuencia cardíaca, azúcar en la sangre, o las tensiones en un puente o una tubería. Los circuitos de control optimizan la cantidad de energía extraída de cada fuente.
El sistema utiliza una innovadora arquitectura de doble vía. Usualmente, las fuentes de energía serían usadas para cargar un dispositivo de almacenamiento, tal como una batería o un supercondensador, que luego alimentarían al verdadero sensor u otro circuito. Pero en este sistema de control, el sensor puede ser alimentado desde un dispositivo de almacenamiento o directamente de la fuente, evitando el sistema de almacenamiento por completo. “Eso lo hace más eficiente”, dice Bandyopadhyay. El chip utiliza un solo inductor de tiempo compartido, un componente crucial para apoyar a los múltiples convertidores necesarios en este diseño, en vez de independientes para cada fuente.
David Freeman, jefe tecnólogo de soluciones de suministro de energía en Texas Instruments, que no participó en este trabajo, dice: “El trabajo que se realiza en el MIT es muy importante para permitir la recolección de energía en diferentes entornos. La capacidad de extraer energía de varias fuentes diferentes ayuda a maximizar la potencia para una mayor funcionalidad de sistemas como los nodos de sensores inalámbricos”.
Sólo recientemente, dice Freeman, compañías como Texas Instruments han desarrollado microcontroladores de muy baja potencia y transceptores inalámbricos que podrían ser alimentados por esas fuentes. “Con innovaciones como éstas que combinan múltiples fuentes de energía, estos sistemas pueden ahora comenzar a aumentar la funcionalidad”, dice. “Los beneficios de operar desde múltiples fuentes no sólo incluye la maximización de la energía máxima, sino que también ayuda cuando puede ser que una sola fuente de energía esté disponible”.
El trabajo ha sido financiado por el Interconnect Focus Center, un programa combinado de la Defense Advanced Research Projects Agency y compañías en las industrias de defensa y de semiconductores.
Una aplicación creada por la NASA que trae algunas de las naves espaciales robóticas de la agencia a la vida en 3D, ahora está disponible gratis en el iPhone y iPad.
Llamada Spacecraft 3D, la aplicación utiliza la animación para mostrar cómo la nave espacial puede maniobrar y manipular sus componentes exteriores. Actualmente, la nueva aplicación dispone de dos misiones de la NASA, el rover Curiosity que se posará en Marte el 5 de agosto a las 10:31 p.m. PDT (6 de agosto a la 1:31 a.m. EDT), y la nave gemela de la mision GRAIL, Ebb y Flow, actualmente en órbita alrededor de la luna.
“Con Spacecraft 3D y un dispositivo móvil, se pueden poner en alta definición, modelos tridimensionales, literalmente, en mano de los niños de todas las edades”, dijo Stephen Kulczycki, subdirector de comunicaciones y educación en el (JPL) Laboratorio de Propulsión a Chorro de la NASA en Pasadena, California.
Spacecraft 3D está entre las primeras de lo que se conoce como aplicaciones de realidad aumentada para dispositivos de Apple. La realidad aumentada ofrece a usuarios una vista de un entorno del mundo real donde los elementos son mejorados por entrada adicional. Spacecraft 3D utiliza la cámara del iPhone o iPad para sobreponer información en la pantalla principal del dispositivo. La aplicación da instrucciones a los usuarios para imprimir un objetivo de realidad aumentada en una hoja de papel estándar. Cuando la cámara del dispositivo está apuntando al blanco, la nave elegida por el usuario se materializa en la pantalla.
“Digamos que usted quiere tener una idea acerca de lo que es nuestro rover Curiosity de Marte” dijo Kevin Hussey, gerente de tecnología de visualización en el JPL. “Al igual que los directores de Hollywood dimensionan sus siguientes tomas, usted mueve iPad o iPhone con cámara equipada dentro y fuera, arriba y abajo, y la perspectiva de la nave espacial se mueve contigo. Es una gran forma de estudiar la naturaleza en 3D de la nave de la NASA”.
Spacecraft 3D también tiene una característica donde usted puede tomar su propia foto de realidad aumentada del rover o nave espacial GRAIL. Incluso se puede hacer un autorretrato con una nave espacial, poniendose a sí mismo o a alguien más en la imagen.
“En un futuro cercano, vamos a incorporar la nave espacial Cassini, que está orbitando Saturno, la nave espacial Dawn, que está en el corazón del cinturón de asteroides, y las Voyagers, que están ahora mismo en el borde de nuestro sistema solar”. dijo Hussey. “Mirando hacia abajo del camino, tenemos un verdadero sistema solar lleno de naves espaciales con las cuales trabajar”.
Spacecraft 3D actualmente sólo está disponible para formatos de Apple, pero estarán disponibles en otros formatos en un futuro cercano.
Los modelos de computadoras detallados de la nave espacial utilizados en Spacecraft 3D fueron generados originalmente para la aplicación web “Ojos en el Sistema Solar” de la NASA. “Ojos en el Sistema Solar” es un entorno en 3D lleno de datos misión de la NASA que permite a cualquier persona explorar el cosmos desde su computadora.
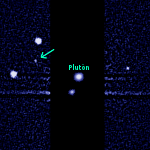
Con ayuda del Hubble de la NASA, un equipo de astrónomos informó sobre el descubrimiento de otra luna, que orbita el helado planeta enano Plutón.
Se estima que la luna posee una forma irregular y de 9.7 a 24 kilómetros de diámetro. Se encuentra en una órbita circular de 93,342 km de diámetro alrededor de Plutón, la cual se asume que es coplanar con los otros satélites en el sistema.
“Las lunas forman una serie de órbitas cuidadosamente anidadas, un poco como las muñecas rusas”, dijo el líder del equipo Mark Showalter del Instituto SETI en Mountain View, California.
El descubrimiento incrementa a cinco el número de lunas conocidas que orbitan alrededor de Plutón.
Al equipo de Plutón le intriga que un planeta tan pequeño pueda tener tal colección compleja de satélites. El nuevo descubrimiento proporciona pistas adicionales para develar cómo el sistema de Plutón se formó y evolucionó. La teoría favorecida es que todas las lunas son vestigios de una colisión entre Plutón y otro gran objeto del Cinturón de Kuiper hace miles de millones de años.
La nueva detección ayudará a los científicos a navegar la nave espacial New Horizons de la NASA a través del sistema de Plutón en el año 2015, cuando haga un sobrevuelo de alta velocidad, histórico y largamente esperado, del mundo lejano.
El equipo está usando la poderosa visión del Hubble para recorrer el sistema de Plutón para descubrir los potenciales peligros a los que se podría enfrentar la nave New Horizons. Dejando atrás al planeta enano a una velocidad de 48,280km por hora, New Horizons podría ser destruida en una colisión con incluso una pieza de desechos orbitales del tamaño de un proyectil BB shot.
“El descubrimiento de tantas lunas pequeñas, nos dice indirectamente que debe haber un montón de pequeñas partículas acechando ocultas en el sistema de Plutón”, dio Harold Weaver del Laboratorio de Física Aplicada de la Universidad Johns Hopkins en Laurel, Maryland.
“El inventario del sistema de Plutón que estamos tomando ahora con el Hubble, ayudará al equipo de New Horizons a diseñar una trayectoria más segura para la nave”, añadió Alan Stern del Instituto de Investigación del Suroeste (SwRI) en Boulder, Colorado, el investigador principal de la misión.
La luna más grande de Plutón, Charon, fue descubierta el año 1978 en observaciones hechas en el Observatorio Naval de los Estados Unidos en Washington, D.C. Las observaciones del Hubble en 2006 descubrieron dos pequeñas lunas adicionales, Nix e Hydra. En el 2011 otra luna, P4, fue encontrada en los datos del Hubble.
Provisionalmente designada S/2012 (134340) 1, también llamada P5, la última luna fue detectada en nueve grupos separados de imágenes tomadas por la cámara de gran angular 3 del Hubble el 26, 27, 29 de junio y el 7 y 9 de julio.
En los años siguientes al sobrevuelo de Plutón del New Horizons, los astrónomos planean usar la visión infrarroja del sucesor previsto del Hubble, el Telescopio Espacial James Webb, para dar seguimiento a las observaciones. El telescopio Webb será capaz de medir la química de la superficie de Plutón, de sus lunas, y de muchos otros cuerpos que se encuentran en el Cinturón de Kuiper junto con Plutón.
Los miembros del equipo Plutón son M. Showalter (del Instituto SETI), H.A. Weaver (del Laboratorio de Física Aplicada, Universidad Johns Hopkins), y S.A. Stern, A.J. Steffl, y M.W. Buie (del Instituto de Investigación del Suroeste).
El Telescopio Espacial Hubble es un proyecto de cooperación internacional entre la NASA y la Agencia Espacial Europea. El Centro de Vuelo Espacial Goddard de la NASA en Greenbelt, Maryland, maneja el telescopio. El Instituto de Ciencia del Telescopio Espacial (STScI) en Baltimore, conduce las operaciones científicas del Hubble. El STScI es operado para la NASA por la Asociación de Universidades para la Investigación en Astronomía (AURA), Inc., en Washington, D.C.